










自動運転シミュレータのCARLA使ってみたいんだけど、worldとかmapとか色々な概念があって関係性がよくわからない。。
本記事では、これからCARLAを使って自動運転のシミュレーションをしてみたいという開発者向けの入門編の内容です。自分自身がこのような境遇だった為、本記事ではまず知っておくべきCARLAの基本概念について図でまとめてみました。
CARLAが何者か、何ができるのかは、以下の動画を見たり、ググればいくつか記事が出ているようなのでそちらを参照していただければと思います。
いざCARLAを使って何かを作ろうと思って、ドキュメンテーションのページCARLA Documentationを見ても、基本的な知識が無いとイマイチ頭に入ってきません。
Core concepts にCARLAの基本概念(コアコンセプト)についての説明がありますが、英語の文章を読むのは少し面倒だし、少し時間がかかります。(日本語の説明って案外無いんですよね。。)
分かり易い図がある方が理解が早いと思うので、今回まとめた図で、短時間で基本を理解いただければと思います。
TVCMで話題の【ココナラ】無料会員登録はこちら
本記事の内容
- CARLAの基本概念(コアコンセプト)を簡単な図でまとめました。
- CARLAの中で良く出てくる基本的用語のイメージがつかめると思います。
CARLAの基本概念図
Core concepts に記載されている概念を図にまとめてみたのが以下です。
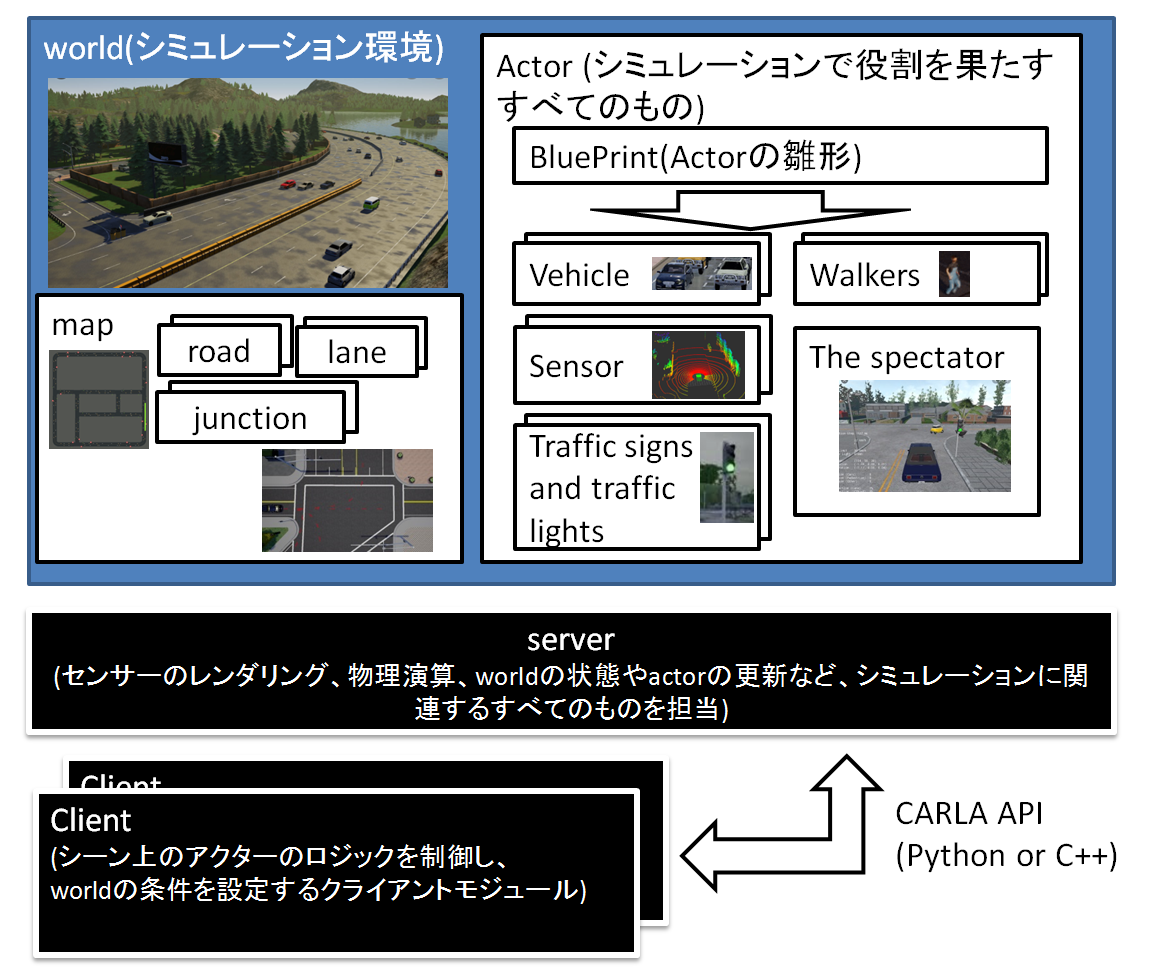
以下、図に対する簡単な補足です。
(※まずは大まかな概念の理解に注力しているので、上級者の方から見ると細かいところは違うかもしれませんがご容赦下さい。。)
server,client
- CARLAシミュレーターは、スケーラブルなserver(サーバ)/client(クライアント)の関係で構成されています。
- それぞれの役割は図の通りで、両者はCARLA APIというインターフェースによって情報のやり取りができます。同時に多くのクライアントを実行することができます。
world
- シミュレーションごとに唯一であり、シミュレーション世界そのものを表現しているオブジェクトです。map(地図,街)やactor(車などの物体)を持ちます。
map
- CARLAでシミュレーションするにはまず車を走らせる道路などがあるmapが必要です。mapは最初から幾つか用意されており、高速道路や、T字路、交差点が幾つもあるようなものがあります。自作することもできます。
- mapにはroad(道路)、lane(レーン)、junction(交差点)があります。またActorの箱の中にありますがTraffic signs and traffic lights (標識や信号)が配置されているmapもあります。
Actor
- 車やセンサー、信号機など、worldに存在する何らかの役割をもつものがActorです。
- BluePrintは様々なActorを生成するために雛形として用意されているものです。
- Vehicle(車両)、Walkers(歩行者)、Sensor(センサー)、Traffic signsand traffic lights(標識や信号)があります。
- The spectator (日本語で言うなら観客(?))は、シミュレーションの世界を俯瞰するための視点のようなものです。
センサーの種類
CARLAには様々なセンサーが用意されています。
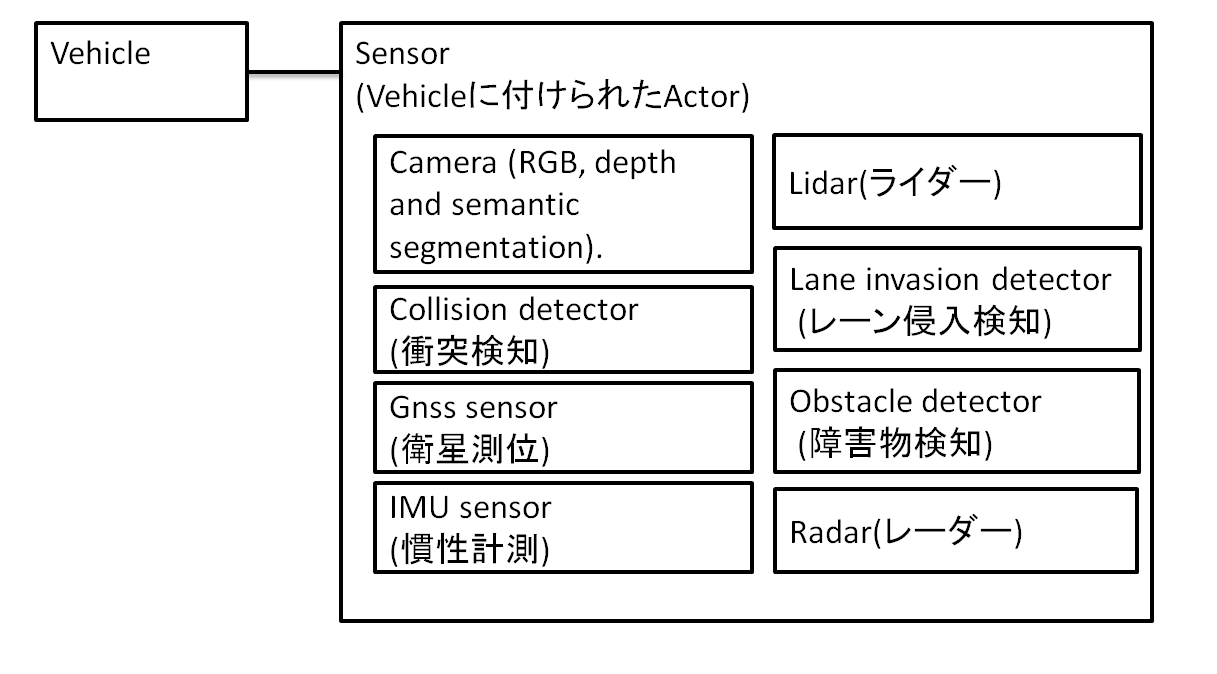
Vehicleにこれらのセンサーを設定しておくことで、カメラ映像の情報、ライダーがとらえる物体の点群情報、加速度や、衝突の検知などの情報が取得できます。
自動運転の世界では、センサーにより危険を予知し、車を安全な経路に安全な速度で走行させるロジックが必要です。本物を用意すると高額になるセンサーがこれだけシミュレートできるのはあり難いですね。
TVCMで話題の【ココナラ】無料会員登録はこちら
まとめ
CARLAを使って何かしらの開発を始めるにあたって、知っておくべき基本概念を図にまとめました。
ここから先は実際に動作する環境と、CARLA Documentationを見て、進めていただければと思います。
私自身もCARLAについてまだまだ知識を深めているところですので、また有用な情報を記事にしていきたいと思います。
では。
TVCMで話題の【ココナラ】無料会員登録はこちら
良ければフォローお願いします。
コメント